








- Product Description
- Specification Parameter
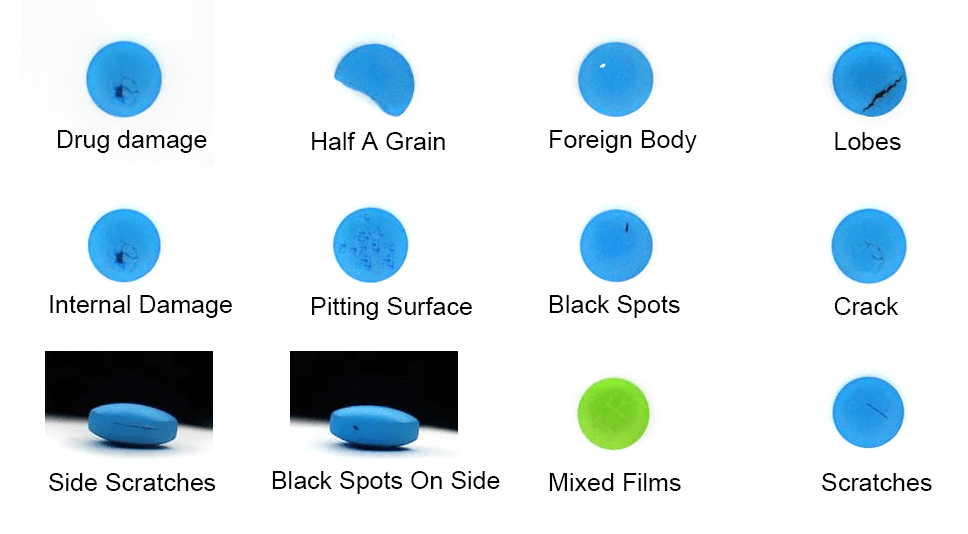
- Product Application
- Product Feature
 399 Dongxin Road, Ruian Economic Development Zone, Wenzhou City, Zhejiang Province, China
399 Dongxin Road, Ruian Economic Development Zone, Wenzhou City, Zhejiang Province, China





We use cookies to enhance your browsing experience and protect your privacy. Please read our privacy policy for more information.

